Bola en equilibrio
Este modelo estudia una bola rodando encima de una barra. La aceleración traslacional de la bola dependerá del ángulo de la barra. Este ejemplo estudia dos esquemas de control distintos, el regulador PID y el regulador LQ, los cuales pueden usarse para controlar la posición de la bola a lo largo de la barra, usando el ángulo de la barra como entrada.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
El modelo
La gravedad actúa sobre la bola, proporcionando una fuerza hacia abajo proporcional a la masa del objeto. Cuando la barra es perpendicular a la fuerza gravitatoria, paralela al suelo, la fuerza normal cancela la fuerza gravitatoria exactamente, y no se aplica aceleración a la bola. Al establecer cuidadosamente el ángulo de la barra, se puede controlar la posición de la bola a lo largo de la barra. El modelo puede usarse para probar distintos métodos para controlar la posición de la bola, tanto en la simulación y con una conexión en tiempo real al hardware.
El ángulo de la barra se controla precisamente mediante un servo. A ambos lados de la barra hay un tope que detendrá la bola para evitar que ruede fuera de la barra. El modelo contiene objetos multicuerpo, en los cuales se han cargado modelos CAD personalizados para visualizar el sistema.
Visualización
Ya que el modelo ha sido creado en System Modeler utilizando la biblioteca MultiBody, se genera automáticamente una animación del modelo. Los modelos CAD personalizados han sido cargados en los objetos para proporcionar una representación precisa del sistema del mundo real.
La salida del modelo se utiliza para controlar el sistema del mundo real, y la entrada del sistema del mundo real se utiliza para animar el modelo.
Diseño de controlador
Use Wolfram Language junto con System Modeler para diseñar un controlador para el hardware, basado en el modelo.

Wolfram Language puede linealizar modelos de sistemas de manera automática, los cuales, a su vez, pueden usarse para la ubicación de polos en controladores PID y para calcular las ganancias de reguladores LQ.
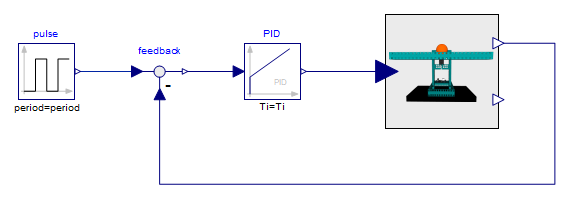
Con los controladores construidos, puede conectar el controlador fácilmente al modelo de software o hardware personalizado utilizando la biblioteca ModelPlug, y comparar cómo se desempeñan los controladores.
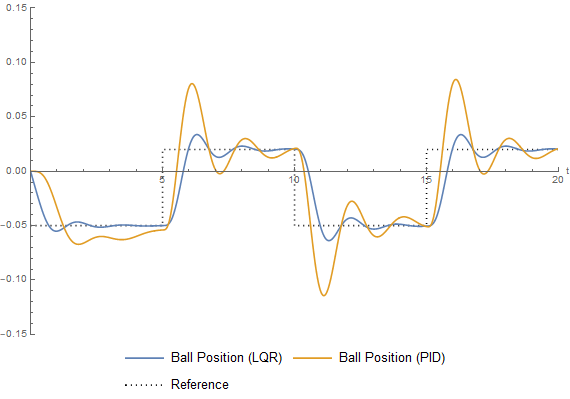
Diseñe y compare
Use Wolfram Language para diseñar controladores y comparar sus salidas.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »